无人驾驶汽车在精准识别和应对突发道路障碍方面,主要依赖其高级的传感器系统、复杂的数据处理算法以及先进的控制策略,以下是一个清晰的分点分析,包括总-分-总的结构:
总述
无人驾驶汽车通过集成多种传感器、利用先进的数据处理技术和控制策略,实现对突发道路障碍的精准识别和有效应对。
分述细节
1. 多源传感技术
激光雷达(LiDAR):提供高精度的距离信息,生成周围环境的三维点云模型。
摄像头:捕捉环境图像,通过计算机视觉技术识别物体类型、颜色和形状。
毫米波雷达:穿透雾霾等恶劣天气条件,测量障碍物距离和速度。
超声波传感器:用于近距离检测,如泊车辅助。
2. 实时数据处理与分析
数据融合:将来自不同传感器的数据进行整合,形成更全面的环境感知能力。
机器学习与深度学习:利用大量标注数据训练模型,提高障碍物识别的准确性和鲁棒性。
路径规划与决策:基于实时感知的环境数据,动态调整行驶策略,确保安全避障。
3. 先进控制策略
预测式巡航控制:根据前方交通流和障碍物预测车辆运动,保持平稳驾驶。
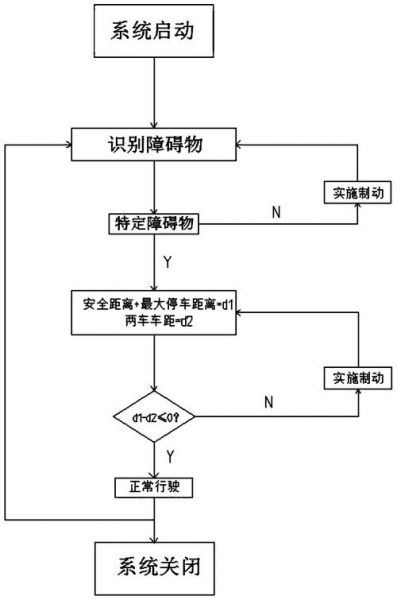
紧急制动系统:遇到突发障碍物时迅速启动,减少碰撞风险。
车道保持与自动转向:在必要时自动调整方向以避开障碍物。
总述
无人驾驶汽车通过集成先进的多源传感技术、实时高效的数据处理与分析能力,以及智能的控制策略,能够精准识别并有效应对道路上的各种突发障碍,随着技术的不断进步和完善,未来无人驾驶汽车将在保障交通安全和提高道路效率方面发挥更加重要的作用。